گروهی از پژوهشگران آمریکایی، یک هشتپای مجازی ساختهاند که از اندامهای حاوی مغز هشتپای واقعی تقلید میکند.
به گزارش پايگاه خبري قرطاس و به نقل از ادونسد ساینس نیوز، رباتهای سفت و بینقص معمولا مانند حیوانات برای کنار آمدن با دنیا تلاش میکنند. مواد نرم و قابل خم شدن که عضلات طبیعی را بهتر شبیهسازی میکنند، به عنوان کلید ساخت ماشینهای سازگارتر، مورد استقبال پژوهشگران حوزه رباتیک قرار دارند اما از آنجا که میتوانند به روشهای متفاوتی حرکت کنند، کنترل آنها بسیار چالشبرانگیز است.
«ماتیا گازولا»(Mattia Gazzola) استاد مهندسی مکانیک «دانشگاه ایلینوی اربانا شمپین»(UIUC)، برای الهام گرفتن به طبیعت روی آورد. گازولا گفت: انواع موجودات برای به حداقل رساندن نیازهای محاسباتی خود حقههایی را به کار میگیرند. این هوش مکانیکی در خود بدن وجود دارد.
هیچ حیوانی مانند هشتپا، هماهنگی دقیق را در اندامهای نرم ندارد. هشتپاها به دلیل هوش و خلاقیت خود مشهور هستند. این موجودات دارای یک سیستم عصبی بسیار پراکنده هستند، با یک مغز که در بدن حباب مانند آنها قرار دارد و عملکردهای سطح بالایی مانند یادگیری و تصمیمگیری را انجام میدهد. بافت عصبی در هر اندام به تنهایی دستورات حرکتی اولیه را انجام میدهد.
یک مارول یادگیری ماشینی
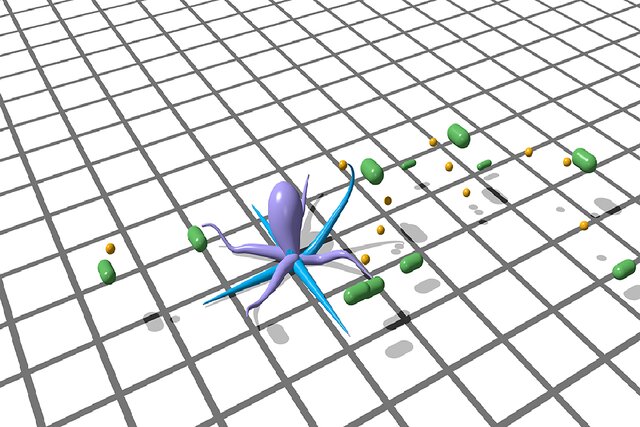
گروه گازولا با الهام از این ساختار سلسلهمراتبی مغز، یک هشتپا ساختند. آنها در این پژوهش، یک هشتپای مجازی موسوم به «سایبرآکتوپس»(CyberOctopus) را ارائه کردند. سایبرآکتوپس، یک ربات نرم شبیهسازیشده چندپاست که از یک راهبرد یادگیری ماشینی سلسله مراتبی برای جستجوی خوراکیهای مجازی استفاده میکند.
هر بازوی سایبرآکتوپس مانند یک میله قابل خم شدن مدلسازی شد که توسط عضلات مجازی الاستیک پوشانده شده بود. با فعال کردن ترکیبات گوناگون این عضلات، اندام میتواند منقبض و خم شود یا انبساط یابد و بپیچد. امواج متحرک انقباضهای عضلانی میتوانند بازوها را مواج کنند تا موجودی را در یک محیط مجازی حرکت دهند یا آن را قادر سازند تا یک هدف غذایی را بگیرد و به دهان ببرد.
گازولا گفت: یکی از روشهای رایج در یادگیری ماشینی و فناوریهای رباتیک، انتقال دادن یک شبکه عصبی بزرگ به سیستم است و امیدواریم که یاد بگیرد چه کاری انجام دهد. این روش میتواند در محیطهای سادهای کارآیی داشته باشد که تعداد محدودی از اقدامات و نتایج ممکن برای ربات وجود دارد اما در اینجا، متغیرهای زیادی وجود دارند که نمیتوان با آنها مقابله کرد. ما تلاش کردیم و دیدیم که کارآیی ندارد.
گازولا و «چیا هسین شیه»(Chia-Hsien Shih) دانشجوی مقطع دکتری دانشگاه ایلینوی اربانا شمپین، یک سیستم کنترل سهلایه را برای هدایت سایبرآکتوپس طراحی کردند. پایینترین سطح به موانعی میپردازد که اساسا هیچ محاسباتی ندارند و به عضلات اندام دستور میدهند که وقتی به چیزی برخورد میکنند، به طور واکنشی شل شوند.
هر اندام به صورت فردی از دو الگوریتم ساده استفاده میکند که به آن امکان میدهد دو رفتار اساسی رسیدن به هدف غذایی و خزیدن را به تنهایی انجام دهد. یک الگوریتم پیچیدهتر که بالاتر از آنها قرار دارد، تلاش میکند تا یک دنباله بهینهسازیشده از دو رفتار رسیدن به غذا و خزیدن را به وجود بیاورد و کمک کند تا حد امکان غذا جمعآوری کند و در عین حال، انرژی کمتری را به کار ببرد.
پژوهشگران پس از تأیید این که آنها میتوانند عضلات مورد نیاز را برای خزیدن مدل در یک محیط مجازی فعال کنند، مدل را با کارهای سختتر جمعآوری غذا به چالش کشیدند.
پژوهشگران میزان انرژی مصرفشده هشتپا را نسبت به مقداری که با خوردن دوباره غذا به دست میآورد، ردیابی کردند و دریافتند که روش کنترل سلسلهمراتبی آنها با موفقیت سایبرآکتوپس را از طریق چالشهای جستجوی غذا هدایت میکند. همه این کارها بدون تکیه بر شبکههای عصبی بزرگ انجام میشوند.
گازولا گفت: امروزه تمایل به استفاده کردن از شبکههای عصبی برای همه چیز وجود دارد. شبکههای عصبی، سیستمهای بسیار قدرتمندی هستند. اگر مشکل فیزیکی را درک کنید، میتوانید از این درک به نفع خود استفاده کنید.
ماشینهای بیوهیبریدی و فراتر از آن
اگرچه سایبرآکتوپس در وظایفی که در این پژوهش با آنها روبهرو شد، موفق بود اما این مدل هنوز هم تواناییهای خلاقانه حل مسئله یک اختاپوس واقعی را نشان نمیدهد. گازولا گفت: رباتهایی که بتوانند بفهمند چگونه از یک آکواریوم مجازی در چنین فضای بزرگی و در یک محیط پیچیده فرار کنند، هنوز وجود ندارند.
از سوی دیگر، علم مواد، رباتیک و روشهای یادگیری ماشینی روزبهروز قویتر میشوند. بنابراین، ابداع کردن یک سایبرآکتوپس با هوش مشابه هشتپای واقعی ممکن است در آینده امکانپذیر باشد.
گازولا، رویای ساخت ماشینهای نرم بیوهیبریدی را در سر دارد که محاسبات را با استفاده از بافتهای مصنوعی و زنده انجام میدهند. وی گفت: هشتپا بهانهای برای توسعه این فناوری به منظور استفاده گستردهتر بود.
برای مثال، رباتهای نرم ممکن است به ویژه برای مسیریابی در محیطهای خشن مناسب باشند که در آنها رباتهای سفت و استاندارد با مشکل روبهرو میشوند. نرمی همیشه هدف ساخت رباتهایی است که در نقشهای بالقوه پزشکی، مراقبتی یا واکنش اضطراری با انسان تعامل دارند.
گازولا در مورد طیف گستردهای از برنامههای کاربردی آینده گفت: این یک فضای وسیع است. اگر بدن را درک کنید، میتوانید از آن برای حل کردن یک مشکل دشوار به روشی ساده استفاده کنید. این پژوهش نشان میدهد که این کار امکانپذیر است.
این پژوهش در «Advanced Intelligent Systems» به چاپ رسید.
منبع: ايسنا